For anyone who has ever looked at the code for betaflight, arducopter or px4 and built a moderately complex quadcopter from parts... I really wonder what the balancing/descent/sensor package and software looks like on the rocket-crane thing.
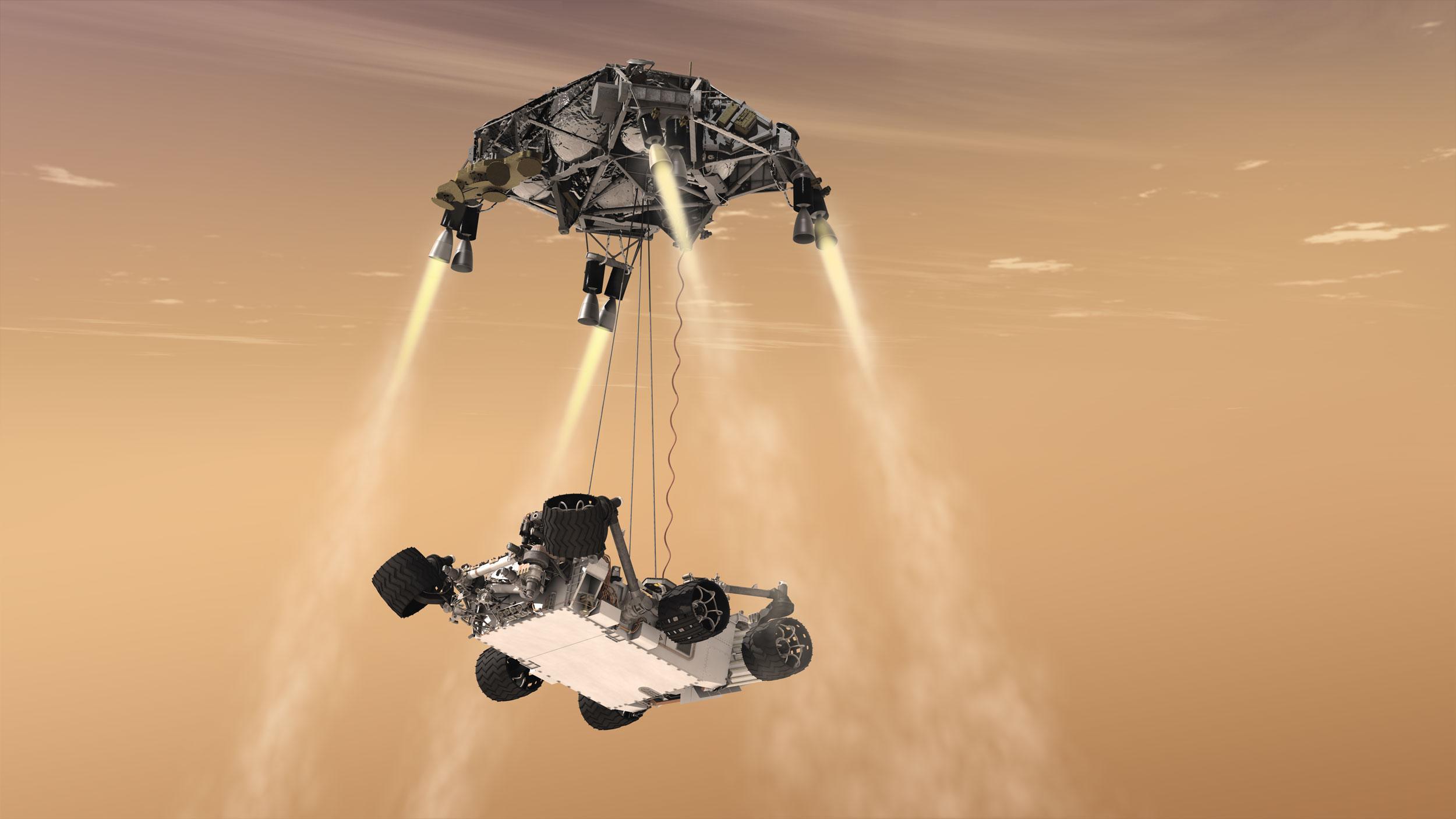
As I understand it, after it jettisons the aero shell, it reaches a certain height by radar altimeter and then activates active rocket thrust to balance a big square flying platform over the landing area, with a very limited flight time possible (based on weight budget/fuel supplies), and then uses the skycrane system to lower the rover.
What sort of 6-axis IMUs and sensors must be on that thing , and how quickly can it adjust thrust per corner to keep itself flying level while descending...
Does it swivel the small rocket motors? Or is it based on thrust adjustment only? How many different radar and laser altimeter type sensors does it use to determine that it's above a suitable flat spot? All sorts of fun questions.
Based on available renderings for both skycranes[1][2], the motors do not appear to have any gimble ability, so must be controlled by thrust alone. It's interesting that the valves consume 168 watts of power each, 1.34kw of power just for the throttle valves. The paper in [4] mentions they were adapted from the same engines used for the Viking landers.
A paper specifically on the EDL system [4]. Page 13 is where the fun starts.
The IMU appears to be a Honeywell MIMU [5][6] and is combined with a radar altimeter for navigation and attitude control.
{kind=link}
As I understand it, after it jettisons the aero shell, it reaches a certain height by radar altimeter and then activates active rocket thrust to balance a big square flying platform over the landing area, with a very limited flight time possible (based on weight budget/fuel supplies), and then uses the skycrane system to lower the rover.
What sort of 6-axis IMUs and sensors must be on that thing , and how quickly can it adjust thrust per corner to keep itself flying level while descending...
https://www.space.com/16889-mars-rover-curiosity-sky-crane-l...
Does it swivel the small rocket motors? Or is it based on thrust adjustment only? How many different radar and laser altimeter type sensors does it use to determine that it's above a suitable flat spot? All sorts of fun questions.